| |
| Распечатать |
|
|
| Назначение, устройство, классификация регуляторов давления газа |
Автоматический регулятор давления газа
состоит из исполнительного механизма и регулирующего органа. Основной
частью исполнительного механизма является чувствительный элемент,
который сравнивает сигналы задатчика и текущего значения регулируемого
давления. Исполнительный механизм преобразует командный сигнал в
регулирующее воздействие и в соответствующее перемещение подвижной части
регулирующего органа за счет энергии рабочей среды (это может быть
энергия газа, проходящего через регулятор, либо энергия среды от
внешнего источника — электрическая, сжатого воздуха, гидравлическая).
Если
перестановочное усилие, развиваемое чувствительным элементом регулятора
газа, достаточно большое, то он сам осуществляет функции управления
регулирующим органом. Такие регуляторы называются регуляторами прямого
действия. Для достижения необходимой точности регулирования и увеличения
перестановочного усилия между чувствительным элементом и регулирующим
органом может устанавливаться усилитель — командный прибор (называемый «пилотом»).
Измеритель управляет усилителем, в котором за счет постороннего
воздействия (энергии рабочей среды) создается усилие, передающееся на
регулирующий орган.
В связи с тем, что регулятор давления газа
предназначен для поддержания постоянного давления в заданной точке
газовой сети, то всегда необходимо рассматривать систему автоматического
регулирования в целом — «регулятор и объект регулирования». Принцип
работы регуляторов давления газа основан на регулировании по отклонению
регулируемого давления. Разность между требуемым и фактическим
значениями регулируемого давления называется рассогласованием. Оно может
возникать вследствие различных возбуждений — либо в газовой сети из-за
разности между поступлением газа в нее и расходом газа, либо из-за
изменения входного давления газа.
Правильный подбор регулятора
давления должен обеспечить устойчивость системы «регулятор-газовая
сеть», то есть способность ее возвращаться к первоначальному состоянию
после прекращения возмущения.
Регуляторы давления бывают астатические, статические и изодромные.
В системах газораспределения два первых типа регуляторов получили наибольшее распространение.
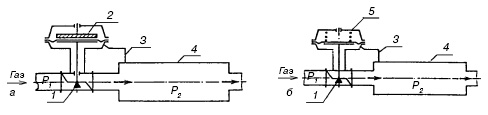
В астатических регуляторах (рис. 1,а)
на чувствительный элемент (мембрану) действует постоянная сила от груза
2. Активная (противодействующая) сила — это усиление, которое
воспринимает мембрана от выходного давления Р2. При увеличении отбора
газа из сети 4 будет уменьшаться давление Р2, баланс сил нарушится,
мембрана пойдет вниз и регулирующий орган откроется.
Такие
регуляторы после возмущения приводят регулируемое давление к заданному
значению независимо от величины нагрузки и положения регулирующего
органа. Равновесие системы может наступить только при заданном значении
регулируемого давления, причем регулирующий орган может занимать любое
положение. Такие регуляторы следует применять на сетях с большим
самовыравниванием, например, в газовых сетях низкого давления достаточно
большой емкости.
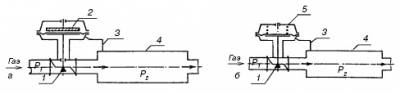 Рис. 1. Схемы регуляторов давления:
а
— астатический регулятор; б — статический регулятор давления; 1 —
регулирующий (дроссельный) орган; 2 — мембранный-грузовой привод; 3 —
импульсная трубка; 4 — объект регулирования — газовая сеть; 5 —
мембранный-пружинный привод.
Люфт,
трение в сочленениях могут привести к тому, что работа регулятора
станет неустойчивой. Для стабилизации процесса в регулятор вводят
жесткую обратную связь. Такие регуляторы называются статическими. При
статическом регулировании равновесное значение регулируемого давления
всегда отличается от заданной величины, и только при номинальной
нагрузке фактическое значение становится равным номинальному.
Статические регуляторы характеризуются неравномерностью. Под
неравномерностью регулятора понимается величина изменения регулируемого
параметра, необходимая для перестановки регулирующего органа из одного
крайнего положения в другое (в пределах регулируемого диапазона
регулятора).
В регуляторе (рис. 1,б) груз заменен пружиной —
стабилизирующим устройством. Усилие, развиваемое пружиной,
пропорционально ее деформации. Когда мембрана находится в крайнем
верхнем положении (регулирующий орган закрыт), пружина приобретает
наибольшую степень сжатия и Р2 — максимальное. При полностью открытом
регулирующем органе значение Р2 уменьшается до минимального. Статическую
характеристику регуляторов выбирают пологой, с тем чтобы
неравномерность регулятора была небольшой, при этом процесс
регулирования становится затухающим.
Изодромный регулятор (с
упругой обратной связью) при отклонении регулируемого давления Р2
сначала переместит регулирующий орган на величину, пропорциональную
величине отклонения, но если при этом давление Р2 не придет к заданному
значению, то регулирующий орган будет перемещаться до тех пор, пока
давление Р2 не достигнет заданного значения.
Термины используемые для характеристики работы регуляторов давления газа:
Статическая ошибка — отклонение регулируемого давления от заданного при установившемся режиме, также называют неравномерностью регулирования.
Динамическая ошибка — максимальное отклонение давления в переходный период от одного режима к другому.
Ход клапана — расстояние, на которое перемещается клапан от седла.
Диапазон настройки — разность между верхним и нижним пределами давления, между которыми может быть осуществлена настройка регулятора.
Верхний предел настройки давления — максимальное выходное давление, на которое может быть настроен регулятор.
Зона регулирования — разность между регулируемыми давлениями при 10 % и 90 % от максимального расхода.
Зона нечувствительности — разность регулируемого давления, необходимая для изменения направления движения регулирующего органа.
Зона пропорциональности
— изменение регулируемого давления, необходимое для перемещения
регулирующего органа (клапана) на значение его номинального (полного)
хода.
Условная пропускная способность Кv — величина, равная
расходу воды плотностью 1 г/см³ (1000 кг/м³) в кубических метрах в час
через регулятор при номинальном ходе клапана и перепаде давления 0,1
МПа (1 кг/см²).
Относительная протечка — отношение
максимального значения протечки воды через затвор регулирующего органа
при перепаде давления на 0,1 МПа и условной пропускной способности Кv.
Конструкции регуляторов давления газа должны удовлетворять следующим требованиям:
зона
пропорциональности не должна превышать 20 % верхнего предела настройки
выходного давления для комбинированных регуляторов и регуляторов
баллонных установок и 10 % для всех других регуляторов;
зона нечувствительности не должна быть более 2,5 % верхнего предела настройки выходного давления;
постоянная времени (время переходного процесса регулирования при резких
изменениях расхода газа или входного давления) не должна превышать 60
с.
Основными элементами регулирующих органов являются
затворы. Они могут быть односедельные, двухседельные, диафрагменные и
шланговые, крановые и заслоночные.
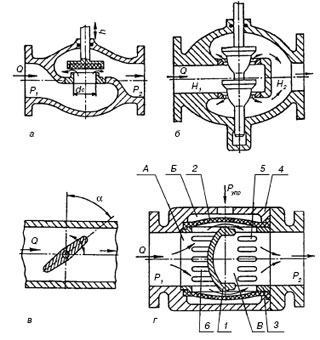
В городских системах газоснабжения в основном применяют регуляторы с односедельными и двухседельными затворами, реже — с заслоночными и шланговыми (рис. 2).
Рис. 2. Конструктивные схемы дросселирующих органов регуляторов давления газа:
а — с односедельным затвором; б — с двухседельным; в — с заслоночным; г — со шланговым.
Односедельные
и двухседельные затворы могут выполняться как с жестким уплотнением
(металл по металлу), так и с эластичным (прокладки из маслобензостойкой
резины, кожи, фторопласта). Такие затворы состоят из седла и клапана.
Достоинством односедельных затворов является то, что они легко
обеспечивают герметичность уплотнения.
Однако клапаны
односедельных затворов являются не разгруженными, так как на них
действует разность входного и выходного давлений.
В регуляторах
давления газа широко применяют тарельчатые плоские клапаны с эластичным
уплотнением. Полный ход плоского клапана, при котором будет
осуществляться процесс регулирования, определяется из равенства боковой
поверхности цилиндра с диаметром седла dс, высотой подъема клапана h и площади седла клапана:
(πdс²)/4=πdсh, h=0.25dс
Для
примера: регулятор с диаметром седла 4 мм имеет полный ход клапана 1
мм. Практически высоту подъема плоского тарельчатого клапана принимают
(0,3+0,4)dс. Дальнейший подъем клапана не сказывается на его пропускной
способности. При изменении формы затвора ход клапана можно увеличить.
Двухседельные
затворы при тех же условиях обладают значительно большей пропускной
способностью вследствие большей суммарной площади проходного сечения
седел. Эти клапаны являются разгруженными, однако при отсутствии расхода
газа они не обеспечивают герметичности, что объясняется трудностью
посадки затвора одновременно по двум плоскостям. Двухседельные
регулирующие органы используют чаще в регуляторах с постоянным
источником энергии.
Заслоночные затворы обычно применяют в регуляторах установленных в ГРП (ГРУ)
с большими расходами газа (например, ТЭЦ) и используют как регулирующий
орган регуляторов непрямого действия с посторонним источником энергии.
Шланговый
регулирующий орган (рис. 2,г) имеет эластичный шланг 2 и стакан 3,
расположенный в корпусе 4. В стакане 3 есть два ряда продольных прорезей
5 и 6 для прохода газа и поперечная перегородка 1.
Перегородка 1
и эластичный шланг 2 разделяют полость устройства на три камеры: А —
входного, В — выходного и Б — управляющего давления.
При
отсутствии входного давления шланг герметично отделяет камеру А от
камеры В под действием предварительного натяжения, с которым шланг надет
на стакан. При подаче Р1 шланг отжимается от стакана. При подаче
управляющего давления в камеру Б изменяется зазор между шлангом и
стаканом и происходит регулирование. Затвор аналогичного типа имеет
регулятор давления РДО-1.
В регуляторах давления газа, устанавливаемых в ГРП (ГРУ), в качестве чувствительного элемента и одновременно привода в основном используют мембраны.
Плоская
мембрана представляет собой круглую плоскую пластину из эластичного
материала. Мембрана зажимается между фланцами верхней и нижней
мембранных крышек. Центральная часть мембраны с обеих сторон зажата
между двумя круглыми металлическими дисками (обжимными). Жесткие диски
увеличивают перестановочную силу и уменьшают неравномерность
регулирования.
Перестановочное усилие, развиваемое мембраной,
зависит от величины так называемой эффективной площади мембраны. Она
изменяется в зависимости от прогиба мембраны. Перестановочное усилие
определяется по формуле:
N = cFP,
где c — коэффициент активности мембраны; F — площадь мембраны (в проекции на плоскость ее заделки); P — избыточное давление рабочей среды; cF — активная площадь мембраны.
Зависимость коэффициента активности мембраны c от величины ее относительного прогиба Δh приведена на рис. 3.
 Рис. 3. Рис. 3.
В
связи с тем, что при различном прогибе мембраны значения коэффициента
активности изменяются, изменяется и перестановочное усилие мембраны. Это
создает неравномерность регулирования. Поэтому для плоской мембраны с
двумя обжимными металлическими дисками (диаметром 0,8 диаметра мембраны)
оптимальным является участок на кривой при изменении Δh от 0 до 1/2,
соответственно, коэффициент активности c изменяется в пределах от 1 до 2/3 (~ от 100 до 67 %).
Диаметр
обжимных дисков принято выбирать не более 0,8 диаметра мембраны для
обеспечения необходимой подвижности мембранного привода.
|
|
|
|
|
|